Paige Fullerton | Turibius Rozario | Marelen Soto

Assessing Campus Vegetation From Above
Paige Fullerton, Brian Hughes, Neil Taylor, Sarah Armstrong, Cheyenne Nickerson
Charlie Kaylor, Geography and Environmental Systems
Location: UC Ballroom 1 – 2 p.m.
This presentation will present the method and findings from an ongoing effort by the GES 286 course to gauge the health of campus vegetation. Students collect data necessary to derive the Normalized Differential Vegetation Index (NDVI) by sending tethered weather balloons with a payload of two cameras (one color; the other, infrared) 450 feet above campus to observe vegetation at different locations on the UMBC campus. Results are then georeferenced using Geographic Information Systems to generate the NDVI using “map algebra”. This approach is analogous to imaging techniques used for research and policy purposes, introducing students to the data models and techniques used in remote sensing generally. Ultimately, by imaging repeatedly, we can observe how the overall health of campus vegetation changes seasonally and over time.
UMBC Multidisciplinary Capstone: Design and Development of an Autonomous Fixed-Wing UAV for Long-Range Payload Delivery
Turibius Rozario, Joseph DeFusco, Adam Miu, Alex Vennos, Sean Stahler, Abby Joseph, Connor Cox, Emily Kosloski
Mentor: Charles LaBerge
Location: UC Ballroom 11 – Noon
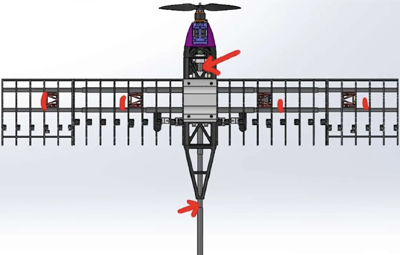
A UMBC multidisciplinary capstone team is designing and constructing a fixed-wing UAV. The UAV will carry a 10 lb payload and fly a range of 10 nautical miles at a minimum airspeed of 35 mph. It will be capable of autonomous flight and avoiding hazards. This aircraft is built from 3D printed and hobby-level electronics and software. It will also be capable of transmitting video and maintaining the safety of operators and nearby property. Sub-teams consisting of Computer and Mechanical Engineers have worked collaboratively to complete these tasks. A conventional gasoline-powered airframe with a v-tail minimizes drag while maintaining structural integrity. Remote ID detection, front sensing LiDAR, bottom-mounted LiDAR, and an airspeed sensor are used for UAV and forward obstacle avoidance and autonomous landing. Real-time Kinematic (RTK) GPS is used for centimeter accuracy. Telemetry radios and long range ExpressLRS radio are used to maintain connectivity over long range. A proof-of-concept prototype with a low-cost flight controller has been constructed. Additional tuning, setup of full autonomy, and configuration of video transmission, including lessons learned from the first test flight are yet to be performed.
Multi-Dimensional Mural: A Live Performance of Art, Sound, and Movement
Marelen Soto, David Cobb Jr , Maria Fernanda Diaz Miranda, Justine Gaylord
Mentor: Corrie Parks, Visual Arts
Location: UC Ballroom 2-2:30 p.m.

As a fine artist and muralist, I’ve often observed that despite the initial awe and admiration my completed works evoke, those feelings tend to fade from people’s memories quickly. This project aims to elevate static artwork into a dynamic performance that resonates deeply with viewers. By integrating music, movement, and visual art, I hope to foster a shared experience that becomes ingrained in collective memory, enriching our understanding of humanity’s creative expression.
Coming from the Dominican Republic and living in America has shaped my perspective as an Afro-Latina not only through music and art but also socially, politically, culturally, and ethically. This artwork represents not only my own identity but also the world around me. It reflects the ongoing struggles both internal (personal) and external (environmental) that affect my body, mind, and spirit. The selected music serves as an empowering force, connecting me to my roots and driving the emotional rhythm of the performance. My wish is for my art to bring joy and empowerment to communities. A distinctive feature of this work is the live performance, where each piece of animation will be synchronized with the rhythm of the music, creating an interactive, immersive experience.